| 1.ラフテレーンクレーンの無人化技術開発の経緯 |
北陸地方整備局では、落石・土砂崩れが起こりやすい砂防工事現場や災害復旧現場における作業の安全を確保するため、各種建設機械の無人化(ラジコン化)技術の開発を行ってきました。 金沢河川国道事務所管内の砂防工事には非常に危険な現場があるため、既存の無人化システム(油圧ショベル等)で工事を行っていましたが、これらの建設機械では離れた場所に資材を迅速に移動することは難しいため、完全な無人化を行うことができませんでした。 北陸地方整備局ではこれを解決するため、平成14年度及び平成15年度にわたり委員会(無人化施工技術検討委員会・委員長 北陸地方整備局 河川部地域河川調整官)において検討を進めてきました。この結果、作業範囲の広さや施工効率などの優位性、災害時における回送などのための一般公道走行の必要性などから、大型クレーンによる無人化施工が最適であるとの結論を得、無人ラフテレーンクレーンによる無人化技術を開発することを決定し、このほど当該機が完成しました。 この無人ラフテレーンクレーンは危険が伴う砂防工事現場の他、災害復旧現場等の危険箇所での広域的な活用が予定されています。 |
| 2.無人ラフテレーンクレーンの概要 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(1)使用目的
(2)概要と特徴
(3)無人ラフテレーンクレーンの効果
(4)主な仕様
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3.参考資料 | ||||||
|
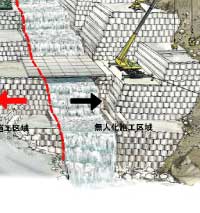
(2)現場作業の無人化の必要性
|


| 4.無人ラフテレーンクレーンの運用にあたっての留意事項 |
|
(2)無人ラフテレンクレーンの作業効率等の把握と支援策
(3)緊急時への対応
(4)今後の改良
|